
LaVi
vollautomatisierter
Laser-Rebschnitt
Laser:viticulture - kurz LaVi - setzt neue Maßstäbe im Weinbau und beantwortet den drängenden Fachkräftemangel mit innovativer Technologie. Basierend auf den Erkenntnissen des Projekts 'KI-Rebschnitt' - das die Machbarkeit intelligenter Schnittvorschläge belegte - entsteht nun ein Roboter, der Rebstöcke mithilfe von KI und Lasertechnik vollautomatisch bewirtschaftet.
Diese präzise Automatisierung übernimmt nicht nur den Rebschnitt, sondern optimiert weitere Arbeitsprozesse. Das Ergebnis: gesteigerte Effizienz, sinkende Kosten und eine zukunftssichere Weinbaubranche, die unabhängig von Personalengpässen bleibt.

Aktuelles
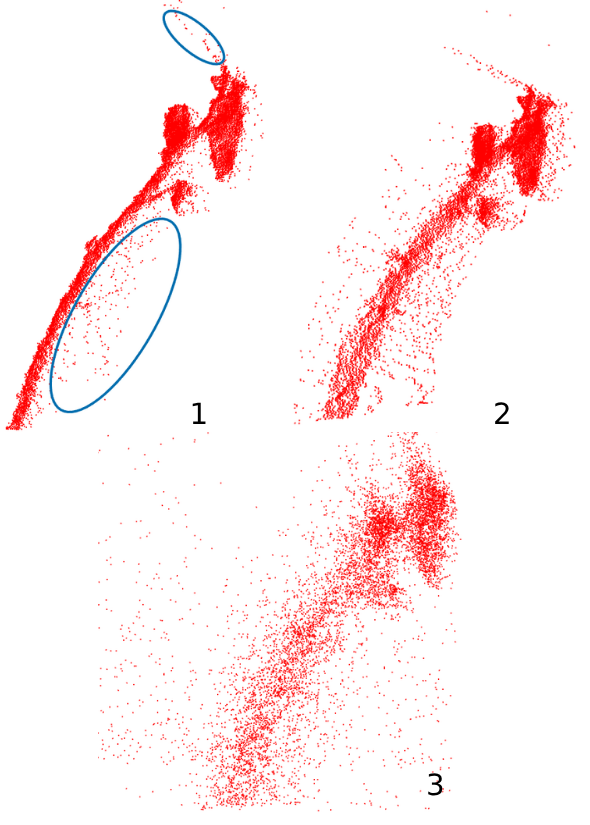
Time-of-Flight (ToF) Tiefenkameras messen nicht die Farbe eines Objekts, sondern seine Entfernung zur Kamera. Das Prinzip dahinter ist elegant: Die Kamera sendet Licht aus, das vom Objekt reflektiert wird – und aus der Zeit bis zur Rückkehr lässt sich die Entfernung berechnen. In der Praxis ist es jedoch nicht ganz so einfach. Reflexionen, Bewegungen während der Aufnahme und andere Einflüsse können das Ergebnis verfälschen. Um solche Fehler korrigieren zu können, müssen wir sie zunächst verstehen.
An den Kanten von Objekten entstehen häufig sogenannte „fliegende Pixel" – Messpunkte (zu sehen in Bild 1), die keiner realen Oberfläche zugeordnet werden können und das Bild verfälschen. Bewegt sich die Kamera während der Aufnahme, verzerrt sich das aufgenommene Objekt (Bild 2). Vibrationen verstärken diesen Effekt zusätzlich und können die Verzerrungen erheblich verschlimmern (Bild 3).
Projektverlauf
03.2026 Erste Einsätze des Prototypen 'Blauer Blitz'
01.2026 - 02.2026 Aufnahmen mit dem ersten Prototypen in Rheinhessen
12.2025 - 02.2026 Bau der Einhausung, Beleuchtung und Kameras
06.2025 - 12.2025 Entwicklung des ersten Prototypen
03.2025 - 05.2025 Bildaufnahmen von auszubrechenden Trieben
11.2024 - 02.2025 Sammeln von Bildmaterial zum Trainieren der KI
01.11.2024 Projektstart: vorzeitiger Maßnahmenbeginn