
LaVi
fully automated
laser vine pruning
Laser:viticulture - LaVi for short - is setting new standards in viticulture and responding to the urgent shortage of skilled workers with innovative technology. Building on the findings of the 'KI-Rebschnitt' project - which demonstrated the feasibility of intelligent pruning recommendations - a robot is now being developed to manage vines fully autonomously using AI and laser technology.
This precise automation not only takes care of pruning, but also optimizes other work processes. The result: increased efficiency, lower costs, and a future-proof viticulture industry that remains independent of labor shortages.

Current News
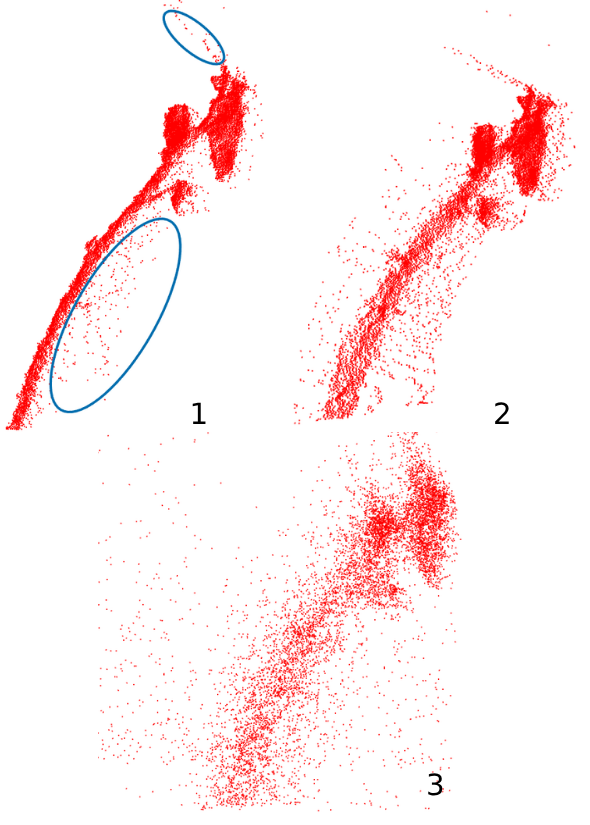
Time-of-Flight (ToF) depth cameras don't measure the color of an object, but rather its distance to the camera. The principle behind it is elegant: the camera emits light that is reflected by the object – and from the time it takes to return, the distance can be calculated. In practice, however, it's not quite that simple. Reflections, movement during capture, and other influences can distort the result. To correct such errors, we first need to understand them.
At the edges of objects, so-called "flying pixels" frequently appear – data points (visible in Image 1) that cannot be assigned to any real surface and therefore distort the image. If the camera moves during capture, the recorded object becomes distorted (Image 2). Vibrations amplify this effect further and can considerably worsen the distortions (Image 3).
Project Timeline
03.2026 First deployments of the ‘Blauer Blitz’ prototype
from 10.2025 Development of hardware basis for the first prototype
06.2025 - 11.2025 Development of the laser cutting system
03.2025 - 05.2025 Image capture of shoots to be removed
11.2024 - 02.2025 Collection of image material for training the AI
01.11.2024 Project start: early start of measures